- 软件大小:196MB
- 软件语言:简体中文
- 软件类型:国产软件
- 软件类别:工程建筑
- 更新时间:2019-04-25
- 软件授权:免费版
- 官方网站://www.9553.com
- 运行环境:XP/Win7/Win8/Win10
- 标签:仿真软件 建模软件
Altair Inspire v2020.0.1 中文版(百度网盘资源)
2.1GB/简体中文/7.5
Siemens Simcenter Flotherm XT v2020.1 中文版百度云
4.4GB/简体中文/6.7
Mentor Graphics QuestaSim 2020.1中文版(百度网盘资源)
677.3MB/简体中文/7.5
AVL Simulation Suite 2020 R1破解版
21GB/简体中文/7.5
1.29GB/简体中文/7.5
Wolfram SystemModeler破解版是一款功能强大的系统模型仿真软件,它内置的可自定义图标列表为您的模型和库创建正确的外观,而且还支持所有FMI标准的导入和导出,允许您集成模型并与其他一百多种工具共同模拟。为此小编在这里准备好了破解版,教程如下,有需要的赶紧来下载吧!
1,双击SystemModeler_12.0.0_WIN.exe,安装软件
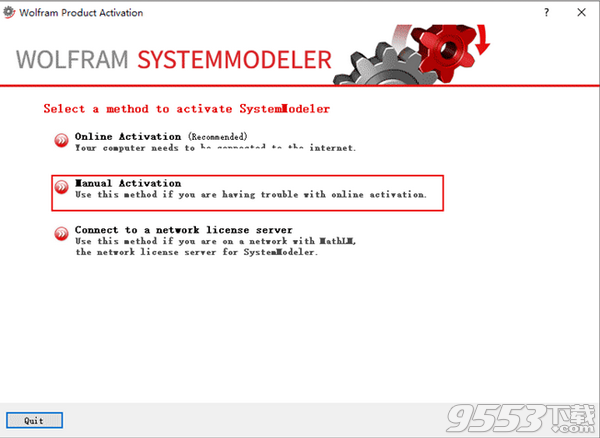
2,运行软件,选择other ways to activate,激活方式选择手动激活
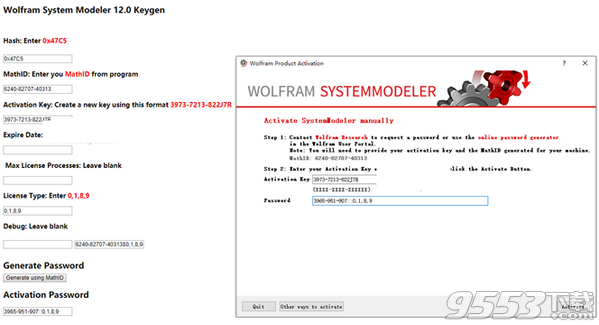
运行注册机(直接用浏览器打开),
Hash输入0x47c5MathID:粘贴你的MathIDLicense TYpe:输入0,1,8,9
点击Generate using MathID,计算激活密码,激活即可。具体如图:
3,安装激活完成,Enjoy
一、模型开发
使用内置的可自定义图标列表为您的模型和库创建正确的外观。»
通过单击或使用逻辑表达式禁用或启用组件,调整模型复杂性,模拟故障模式并添加方案。»
设置模型的默认工作模式,直接跳转到文档,图表或模型代码。»
为您的域定义任何单位,并在模型和模拟中使用它们。»
易于阅读的模型代码,包括单行注释的换行和切换。»
改进了复杂连接的工作流程。
二、连接和部署
支持所有FMI标准的导入和导出,允许您集成模型并与其他一百多种工具共同模拟。»
从任何模型,模拟或参考页面直接跳转到模型分析。
三、模拟与分析
SystemModeler和Wolfram语言现在遵循相同的版本号。
通过更广泛的支持,更好的性能和更多的控制,极大地改进了符号线性化。»
复杂模型的简化模型初始化。
调试模型,了解模拟行为并使用公式浏览器查找性能瓶颈。
一、多域-A伺服机制
此示例显示如何在SystemModeler中逐步开发伺服机制模型。 它说明了多工程功能,并展示了如何使用Simulation Center分析在Model Center中创建的模型,合成控制器以及执行比较研究。
1、直流电机
受控直流电动机的简单动态模型包括可变电压源,电阻器,电感器和表示由DC电动机中的磁场提供的电能和机械能之间的耦合的电动势元件。 电机轴由旋转质量或惯性表示。
所有这些组件都可以在SystemModeler附带的Modelica标准库中找到。 在拖放的帮助下,它们可用于组成模型,如下图所示。
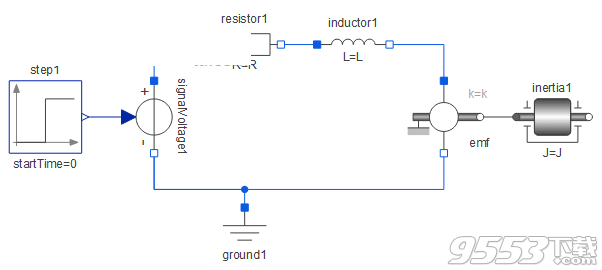
模型中心直流电机的图表视图。
要构建此模型,我们需要创建一个新模型,找到适当的组件,将组件拖放到图表区域,最后使用连接线工具连接组件。
我们首先创建一个名为DCMotor的新模型。我们将使用的组件都可以在Modelica标准库中找到。要找到组件,我们可以搜索它们,或者如果我们知道它们的确切位置,请在类浏览器中打开包含它们的包。我们将展示如何做到这两点。
要找到Step源组件,我们将使用类浏览器来搜索它。在类浏览器的文本框中键入步骤,并等待结果出现。
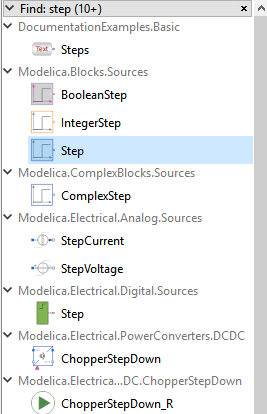
使用ModelCenter中的类浏览器搜索步骤源组件。
您应该在类浏览器中看到“步骤”的前10个匹配项。我们要使用的组件是Modelica.Blocks.Sources.Step组件,如上图所示。
要将此组件添加到我们的DCMotor模型,请将其从类浏览器中拖放到类窗口的DiagramView中。
信号电压组件位于Modelica.Electrical.Analog.Sources包中。当我们知道组件的确切位置时,我们将使用类浏览器的树视图,并将树的分支一直展开到表示组件所在的包Sources的分支。
首先扩展Modelica包。这可以通过单击包图标和名称左侧的符号来完成。
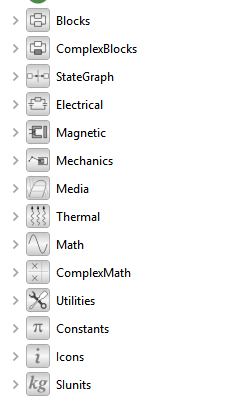
在类浏览器中扩展Modelica包。
如您所见,Modelica包中包含多个包。 我们将继续扩展Electrical封装,然后是Analog封装,最后是Sources封装,我们将在其中找到信号电压元件。
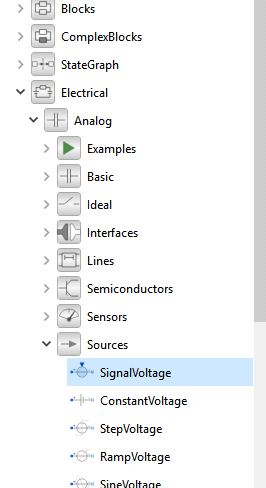
扩展Modelica.Electrical.Analog.Sources包。
将SignalVoltage组件添加到DCMotor,方法是将其拖动到类窗口的Diagram View中。
我们现在已经添加了七个组件中的两个。 其余四个电气元件(电阻,电感,接地和EMF)均可在Modelica.Electrical.Analog.Basic软件包中找到。 由于我们已经扩展了Modelica.Electrical.Analog包,我们可以轻松找到Basic包并对其进行扩展以查找剩余的组件。
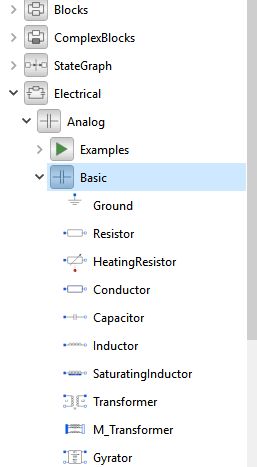
扩展Modelica.Electrical.Analog.Basic包。
将电气元件添加到DCMotor模型后,只剩下一个要添加的元件,即惯性。 它位于Modelica.Mechanics.Rotational.Components包中。 您可以通过展开Modelica,Mechanics,Rotational和Components包来选择是否要搜索它或直接浏览它。
添加惯性组件后,完成直流电机模型所需的全部工作就是连接组件。 使用连接线工具连接组件。
2、模型中心工具栏中的连接线工具。
例如,要将地线连接到信号电压分量的负极引脚,请将鼠标光标放在接地引脚上方,按住鼠标左键,然后按住鼠标光标,同时将鼠标光标移动到信号电压分量的负极引脚。 要建立连接,请释放鼠标按钮。
继续连接所有组件,直到DCMotor的Diagram View类似于本章的第一个图。
在删除和连接组件时,Model Center会生成与操作对应的Modelica代码。 切换到Modelica文本视图以查看模型的文本表示。 在模型的文本表示中,声明每个组件,并且两个组件之间的每个连接由方程式部分中的连接方程表示。
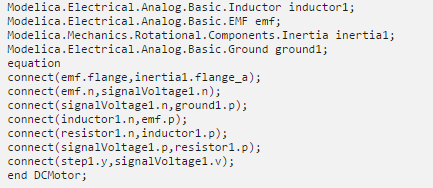
声明和等式的顺序取决于您删除组件和建立连接的顺序。 因此,声明和方程的顺序可能在您的模型中略有不同。 此外,为了便于阅读,所有图形注释都已从上面的DCMotor定义中删除。
DCMotor模型现已完成,可以进行模拟。 但是,首先,我们要指定某些模拟设置。 单击工具栏中“模拟类”按钮旁边的向下箭头,然后选择“实验设置”。 在弹出的“类属性”对话框中,通过编辑“停止时间”将模拟时间设置为25秒。 单击“确定”或按Enter键将设置应用于模型,并自动更新文本视图中的实验注释。 现在单击工具栏中的“模拟类”按钮以打开模拟中心并模拟模型。
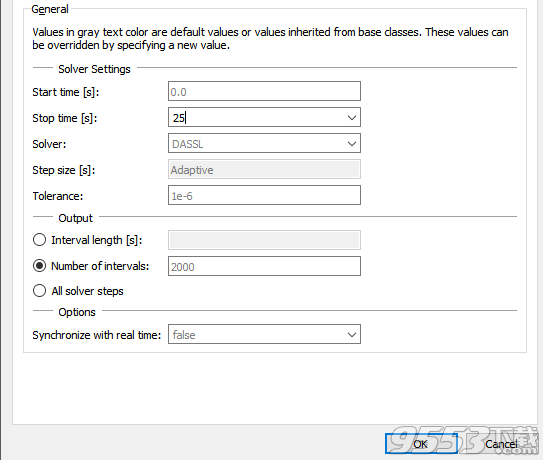
将DCMotor模型的模拟时间设置为25秒。
在实验浏览器中选择要绘制的变量,如下图所示。
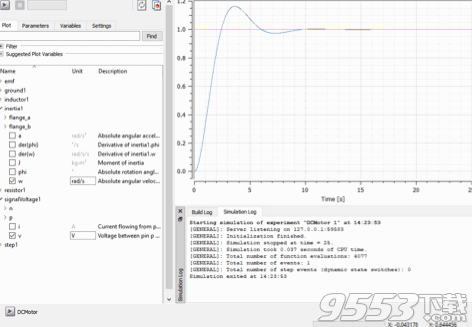
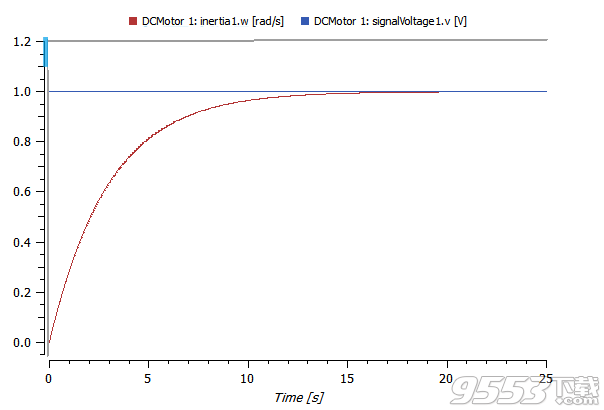
使用默认参数值绘制DCMotor模型的inertia1.w和signalVoltage1.v。
最后,我们得到结果,使用inertia1.w和signalVoltage1.v与时间的关系图。
更改参数值也很容易修改系统行为。 我们将改变电阻器的电阻,电感器的电感和惯性矩,以产生阻尼阶跃响应而不是振荡阶跃响应。
切换到实验浏览器中的“参数”视图。 要在“参数”视图中编辑参数值,请双击当前值。 将电阻1的电阻设置为10欧姆,电感1的电阻设置为0.1 H,惯性矩1设置为0.3 kgm。
再次模拟模型并研究惯性角速度的更新曲线。
使用自定义参数值绘制直流电机模型的惯性1.w和信号电压1.v。
二、刚性和弱轴
在本节中,我们将首先开发一个刚性轴模型,通过添加如下所示的阶跃扭矩来研究其阶跃响应,并通过在刚性轴模型中包含额外的弱点来展示如何更精确地建模轴。
我们首先开发刚性轴模型。 通过在类浏览器中扩展Modelica.Blocks.Sources,Modelica.Mechanics.Rotational.Sources和Modelica.Mechanics.Rotational.Components包,可以找到模型的组件(Step,Torque,Inertia和IdealGear), 或者只是搜索它们。 您可以为模型指定所需的任何名称。 该模型的不同阶段也可在IntroductoryExamples.MultiDomain包中找到。
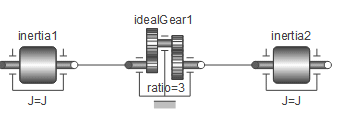
IntroductoryExamples.MultiDomain.StiffAxis模型的Diagram View。
通过选择idealGear1组件,我们可以在位于编辑器底部的Parameters视图中编辑组件的参数。
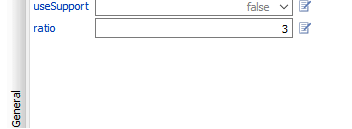
在Model Center中编辑理想齿轮组件的传动比。
给比率参数赋值3.这意味着角度和角速度被放大三倍,并且扭矩从齿轮的一侧到另一侧衰减三倍。 另外,通过将参数startTime的值更改为1秒来更改步骤源的开始时间。
在模拟系统6秒后,我们观察到恒定的扭矩导致恒定的角加速度,即角速度的斜坡和轴的角度的方形曲线,如下所示。
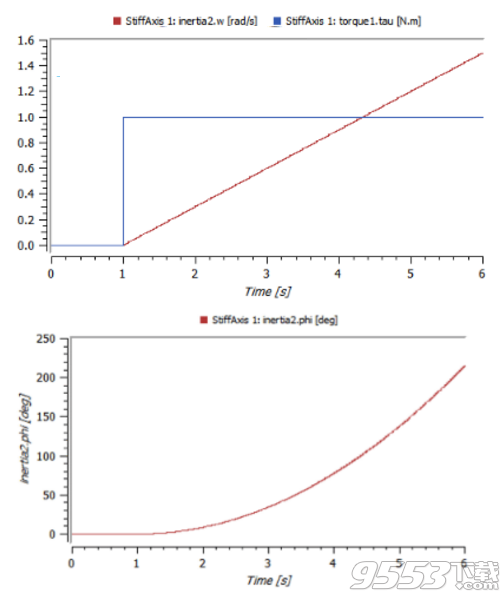
绘制IntroductoryExamples.MultiDomain.StiffAxis模型的扭矩,惯性角速度2和惯性角2。
通过包括额外的弱点,可以更精确地建模轴。 根据下图,通过用由扭转弹簧连接的两个旋转质量组成的模型代替上述轴模型,可以实现这一点。 扭转弹簧可在Modelica.Mechanics.Rotational.Components包中找到。

IntroductoryExamples.MultiDomain.WeakAxis模型的Diagram View。
组件惯性1的力矩为1 kgm,而惯性2和惯性3的力矩为0.5 kgm。 spring1的弹簧常数设定为5 Nm / rad。 我们将模拟该子系统6秒并研究结果(见下文)。 请注意,惯性3,而不是之前的惯性2,是轴的最后一个元素,因此是选定的绘图变量。
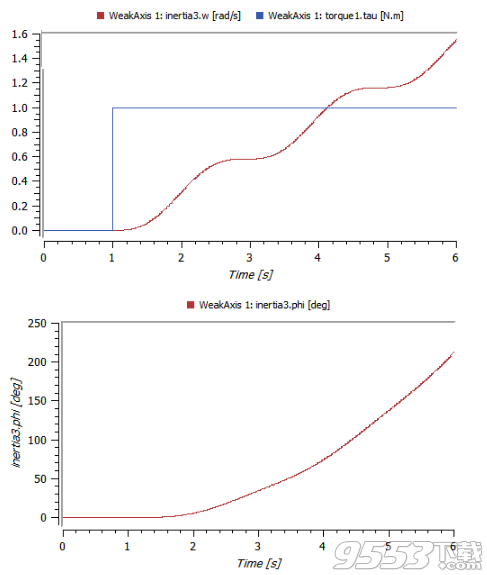
绘制IntroductoryExamples.MultiDomain.WeakAxis模型的扭矩,惯性角3和惯性角速度3。
弱轴模型和刚性轴模型之间的比较表明它们表现相似,但前者具有增加的偏转。
行使
制作一个简单的直流电机,带有一个扭转弹簧,用于输出轴和另一个惯性元件。 模拟和研究结果。 调整一些参数并比较结果。 您可能还想添加输入扭矩并将其连接到惯性2,然后研究系统。
- 支持FMI协同仿真导出和导入
- 显着改进的状态选择算法
- 用于调试和理解模型的公式块浏览器
- 内置的默认图标列表,可在创建新模型时进行选择
- 通过右键单击或逻辑表达式轻松禁用和启用模型中的组件
- 能够选择打开模型时显示的视图(图表,图标,文本或文档)
- 能够添加自定义单位转换
- Modelica文本视图的换行和单个注释的轻松切换
- 改进了连接线的路由和编辑
- 创建连接时清除活动连接器的显示
- 创建阵列连接时改进了工作流程
- 显着改善了显示和编辑图形视图的性能
- 能够轻松地将模型从SystemModeler复制到Wolfram语言桌面产品中
- 改进Wolfram语言中的符号线性化
- 使用Wolfram语言同步版本号
天正软件全系列注册机 绿色免费版
21KB/简体中文/2.8详情
超级绘图王 v4.0官方版
56.2MB/简体中文/2.6详情
天正建筑8.5破解版 安装版
160.63MB/简体中文/5.1详情
畅通房地产管理系统 v3.4 官方安装版
10.2MB/简体中文/8详情
天正建筑2013 试用版 32位/64位 官方安装版 [天正建筑2013下载]
104.54MB/简体中文/5.9详情
天正建筑2013单机版破解补丁 9.0 32位/64位 绿色免费版
3.89MB/简体中文/3详情
天正建筑8.5过期补丁 绿色免费版
24KB/简体中文/2.9详情
轮廓测量仪软件 V1.0 正式版
21.2MB/简体中文/6.7详情
铝合金下单器 v1.0绿色版
431KB/简体中文/4.5详情
挡土墙计算 v2.0绿色免费版
390KB/简体中文/5详情
火箭性能计算器 V1.0绿色免费版
8KB/简体中文/6.7详情
恒智天成北京市建筑工程资料管理软件 2013 官方安装版
43.59MB/简体中文/6.7详情
